Ros Trade Value Chart
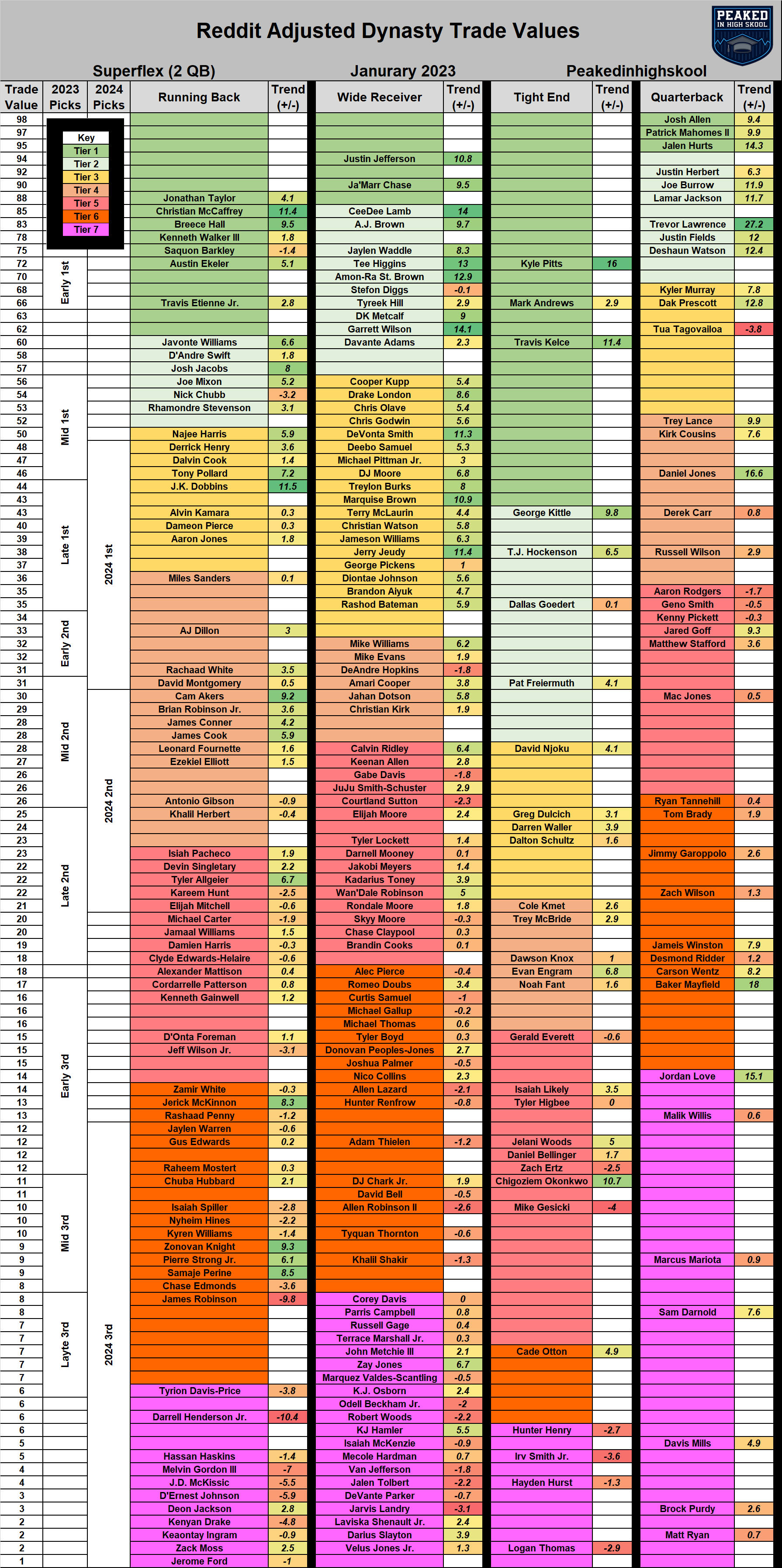
Ros Trade Value Chart - But when i use ros2 run ea maintenance mode manager maintenance mode it doesn't work, i get no executable found. I have been trying to install ros 2 from binary onto windows by following these instructions. In ros1 i would source ros again, rebuild my packages and it would be done ! I have solved the problem of controller spawner couldn't find the expected controller_manager ros interface. by implementing hardware_interface, but now spawner. The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. However your problem appears that you are trying to convert a transform into a transformstamped which isn't going to work because they are not holding the same data. Ros2 humble hawksbill to install ros2 humble, while i'm following this : If geographic_msgs provides a separate development package or sdk, be sure it has been installed. The depthimage to laserscan node is subscribing to the /image topic where i publish the depth images that were converted to the. Trying to use the vcs command to install ros yields this error: But here in ros2 dashing even when sourcing ros2 again i still have this package in those. I have solved the problem of controller spawner couldn't find the expected controller_manager ros interface. by implementing hardware_interface, but now spawner. The depthimage to laserscan node is subscribing to the /image topic where i publish the depth images that were converted to the. In ros1 i would source ros again, rebuild my packages and it would be done ! Trying to use the vcs command to install ros yields this error: I have been trying to install ros 2 from binary onto windows by following these instructions. The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. Ros2 humble hawksbill to install ros2 humble, while i'm following this : But when i use ros2 run ea maintenance mode manager maintenance mode it doesn't work, i get no executable found. If geographic_msgs provides a separate development package or sdk, be sure it has been installed. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. When on the step to run the examples, the c++ talker exits silently, while the python listener. Ros2 humble hawksbill to install ros2 humble, while i'm following this : If geographic_msgs provides a separate development package or sdk, be sure it has been. I am working on ubuntu20.04lts and using ros noetic. But when i use ros2 run ea maintenance mode manager maintenance mode it doesn't work, i get no executable found. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. When on the step to run the examples, the c++ talker exits silently, while. I have been trying to install ros 2 from binary onto windows by following these instructions. The depthimage to laserscan node is subscribing to the /image topic where i publish the depth images that were converted to the. In ros1 i would source ros again, rebuild my packages and it would be done ! The term 'vcs' is not recognized. I have been trying to install ros 2 from binary onto windows by following these instructions. Trying to use the vcs command to install ros yields this error: In ros1 i would source ros again, rebuild my packages and it would be done ! The depthimage to laserscan node is subscribing to the /image topic where i publish the depth. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. If geographic_msgs provides a separate development package or sdk, be sure it has been installed. The depthimage to laserscan node is subscribing to the /image topic where i publish the depth images that were converted to the. I have been trying to install. But when i use ros2 run ea maintenance mode manager maintenance mode it doesn't work, i get no executable found. The depthimage to laserscan node is subscribing to the /image topic where i publish the depth images that were converted to the. Trying to use the vcs command to install ros yields this error: I have been trying to install. The term 'vcs' is not recognized as the name of a cmdlet, function, script file, or operable program. However your problem appears that you are trying to convert a transform into a transformstamped which isn't going to work because they are not holding the same data. If geographic_msgs provides a separate development package or sdk, be sure it has been. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. When on the step to run the examples, the c++ talker exits silently, while the python listener. The depthimage to laserscan node is subscribing to the /image topic where i publish the depth images that were converted to the. The term 'vcs' is. If geographic_msgs provides a separate development package or sdk, be sure it has been installed. I have been trying to install ros 2 from binary onto windows by following these instructions. Ros2 humble hawksbill to install ros2 humble, while i'm following this : When on the step to run the examples, the c++ talker exits silently, while the python listener.. In ros1 i would source ros again, rebuild my packages and it would be done ! Ros2 humble hawksbill to install ros2 humble, while i'm following this : But here in ros2 dashing even when sourcing ros2 again i still have this package in those. However your problem appears that you are trying to convert a transform into a transformstamped. But here in ros2 dashing even when sourcing ros2 again i still have this package in those. When on the step to run the examples, the c++ talker exits silently, while the python listener. The depthimage to laserscan node is subscribing to the /image topic where i publish the depth images that were converted to the. If geographic_msgs provides a separate development package or sdk, be sure it has been installed. But when i use ros2 run ea maintenance mode manager maintenance mode it doesn't work, i get no executable found. However your problem appears that you are trying to convert a transform into a transformstamped which isn't going to work because they are not holding the same data. I have been trying to install ros 2 from binary onto windows by following these instructions. Trying to use the vcs command to install ros yields this error: Ros2 humble hawksbill to install ros2 humble, while i'm following this : I am working on ubuntu20.04lts and using ros noetic.Alex PeakedInHighSkool on Twitter "The January edition of the Dynasty Superflex Trade Value
![[Boone] Week 14 ROS Rankings / Trade Value Chart r/fantasyfootball](https://external-preview.redd.it/boone-week-14-ros-rankings-trade-value-chart-v0-PsZOJFrY_Z_qzZ6RWdQdweAU30gwwwLJ8KjpwviFQhM.jpg?auto=webp&s=8d36cc6dab172d77a7b754c62880043a676e5760)
[Boone] Week 14 ROS Rankings / Trade Value Chart r/fantasyfootball

Week 5 Trade Value Chart, Targets, and ROS Rankings (Fantasy Football 2024) 4for4

ROS Stock Price and Chart — TSXVROS — TradingView

ROS Stock Price and Chart — TSXVROS — TradingView

ROS Stock Price and Chart — TSXVROS — TradingView
Stock Market Scanning, Online Video Training for Traders and Technical Analysis of Stocks at

Week 8 Trade Value Chart, Targets, and ROS Rankings (Fantasy Football 2024) 4for4
.jpg?itok=6B-eL8Qt×tamp=1728488608)
Week 6 Trade Value Chart, Targets, and ROS Rankings (Fantasy Football 2024) 4for4
Fantasy football Week 3 Updated trade value chart, ROS rankings Yahoo Sports
I Have Solved The Problem Of Controller Spawner Couldn't Find The Expected Controller_Manager Ros Interface. By Implementing Hardware_Interface, But Now Spawner.
The Term 'Vcs' Is Not Recognized As The Name Of A Cmdlet, Function, Script File, Or Operable Program.
In Ros1 I Would Source Ros Again, Rebuild My Packages And It Would Be Done !
Related Post: